自動運転 - 歩行者や自転車の認識と予測
Autonomous Driving - Detection of Pedestrian/Cyclist
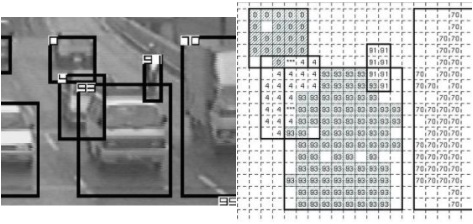
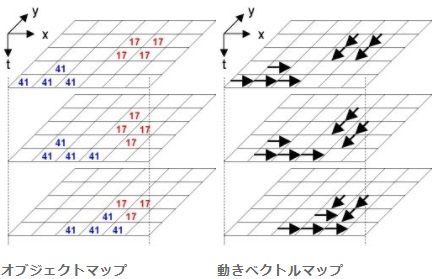
時空間MRFモデルとは、時空間画像を領域分割するための確率モデルのことです。 従来から、 2次元(空間)静止画像の領域分割にMarkov Random Fieldモデルが提案され、 その有用性が示されています。 これに対し、 時空間MRFモデルは、 時空間画像の時間軸方向の相関関係に着目し、 MRFモデルを時空間モデルとして拡張したものです。 通常の空間Markov Random Fieldモデルは、 画素ごとに領域分割を行うものが多い。 時空間MRFモデルでも原理的には同様ですが、 実際には画像フレーム間で車両等は数画素〜数十画素移動するため、 画素ごとに領域分割を行うことは困難です。 そこで、 時空間MRFでは、 8画素×8画素で定義されるブロックを単位として領域分割を行うことにし、 画像フレーム間で有するブロックごとの動きベクトルを参照した時間軸方向の相関を定義することにしました。 さらに、 確率緩和モデルを適用することにより、 オクルージョンの場合でも移動物体の境界を最適解として求めることが出来ます。 例えば、 画像が640画素×480画素で構成されている場合、 80ブロック×60ブロックに関する領域ID分布を求めることになります。 その際、 以下のような最適化パラメータを設定して各ブロックがどの領域に属するかを決定します。 結果として重なった移動物体同士の境界領域が正しく求まれば、 オクルージョンに頑強なトラッキングを行ったことになります。 時空間MRFモデルは、あくまでも物体の移動ベクトルにのみ着目して領域分割するものであり、対象とする物体の種類に依存しません. なお、アルゴリズムや最適化のためのパラメータの詳細については下記の論文を御参照ください。
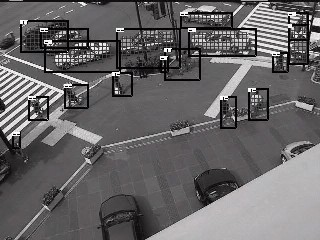
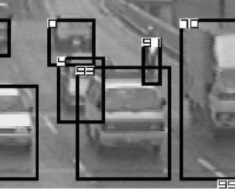
To achieve efficient traffic flow, it is important to base control of traffic signals on observation of pedestrian flow as well as vehicle flow. In consideration of safety, it is also important to analyze behavioral relationship between pedestrians and vehicles, which can be conductive to accidents at intersections. Toward the goals of efficiency and safety, we developed a precise tracking algorithm based on the Spatio-Temporal MRF model which is able to track both pedestrians and vehicles simultaneously against occlusions in the images. During the past few years, this model has been practically applied to acquire traffic flow statistics. However, in this paper, we present an improvement of the S-T MRF model so as to deal with flexible objects such as pedestrians as well as rigid objects such as vehicles. Based on experimental results, this model was able to simultaneously track pedestrians and vehicles against occlusion even in very cluttered situations. Consequently, the improved S-T MRF model was proven to be effective for traffic monitoring at urban intersections.