自動運転 - 悪環境におけるセンシング及びデータ生成
Autonomous Driving - Sensing and Data Synthetic Under Adversarial Conditions
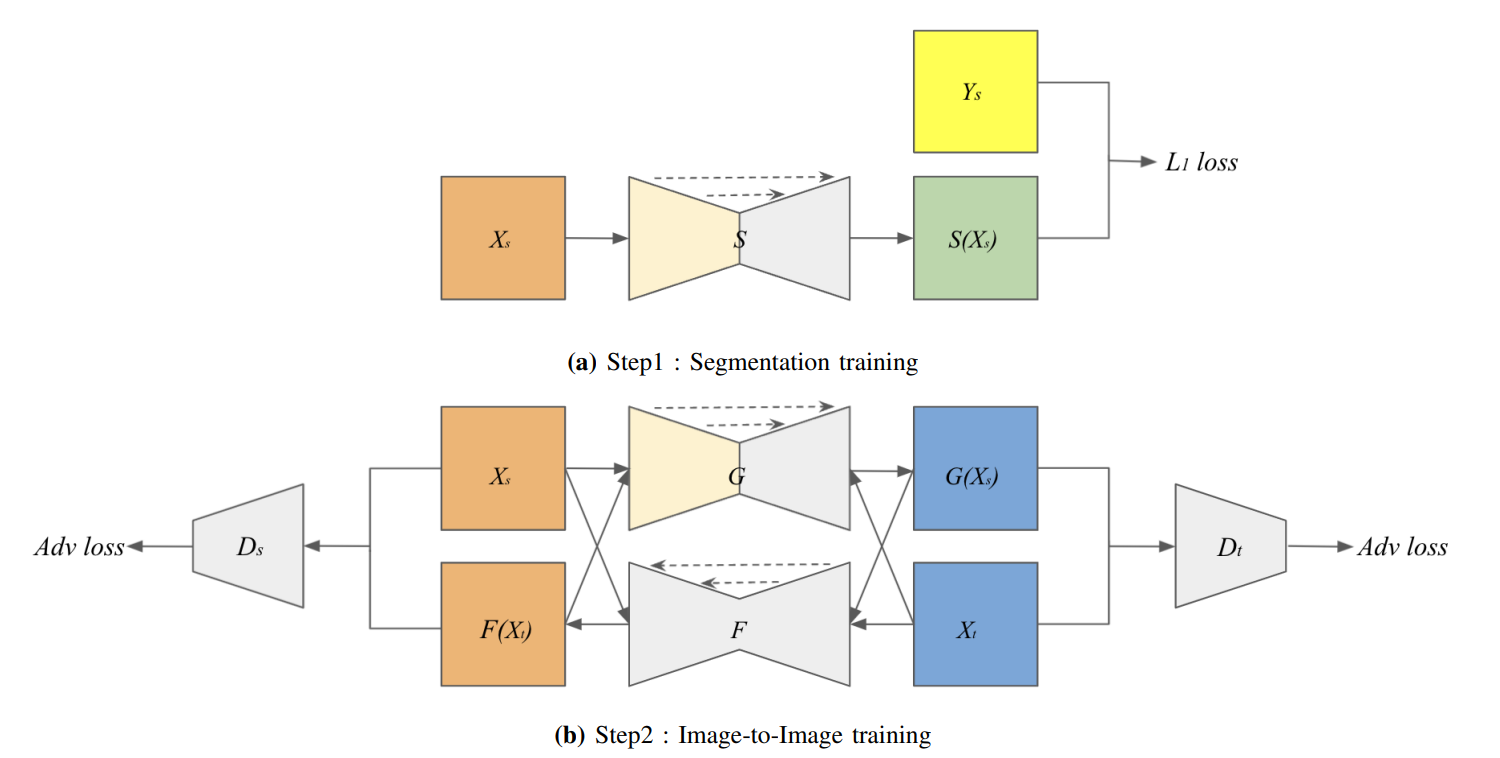
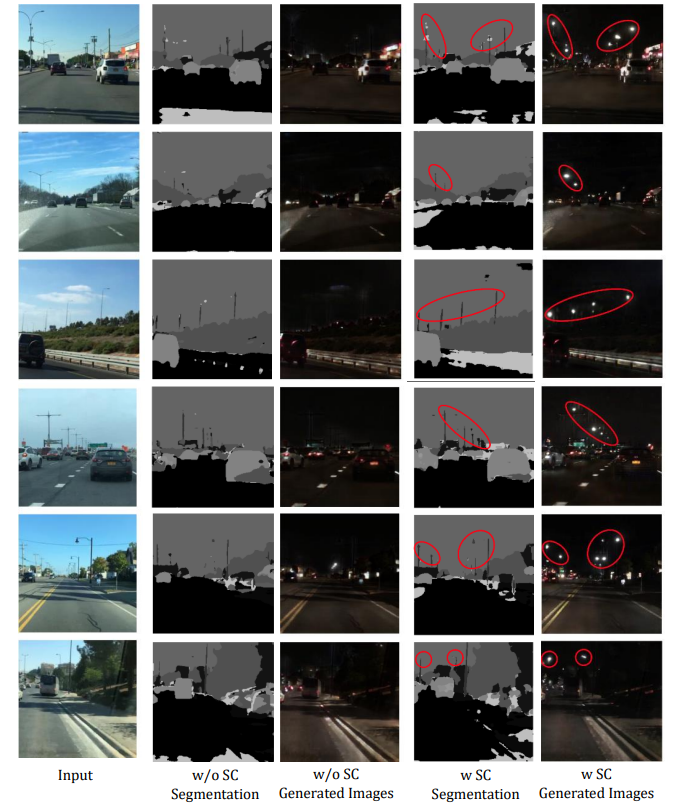
昼間の交通画像を夜間の画像へ変換するために、Generative Adversarial Networks (GANs) による画像生成とSemantic Segmentationを組み合わせたモデルを提案します。
To convert daytime traffic images into nighttime images, we propose a model that combines image generation by Generative Adversarial Networks (GANs) and Semantic Segmentation.