自動運転 - 周辺環境認識
Autonomous Driving - Scene Understanding
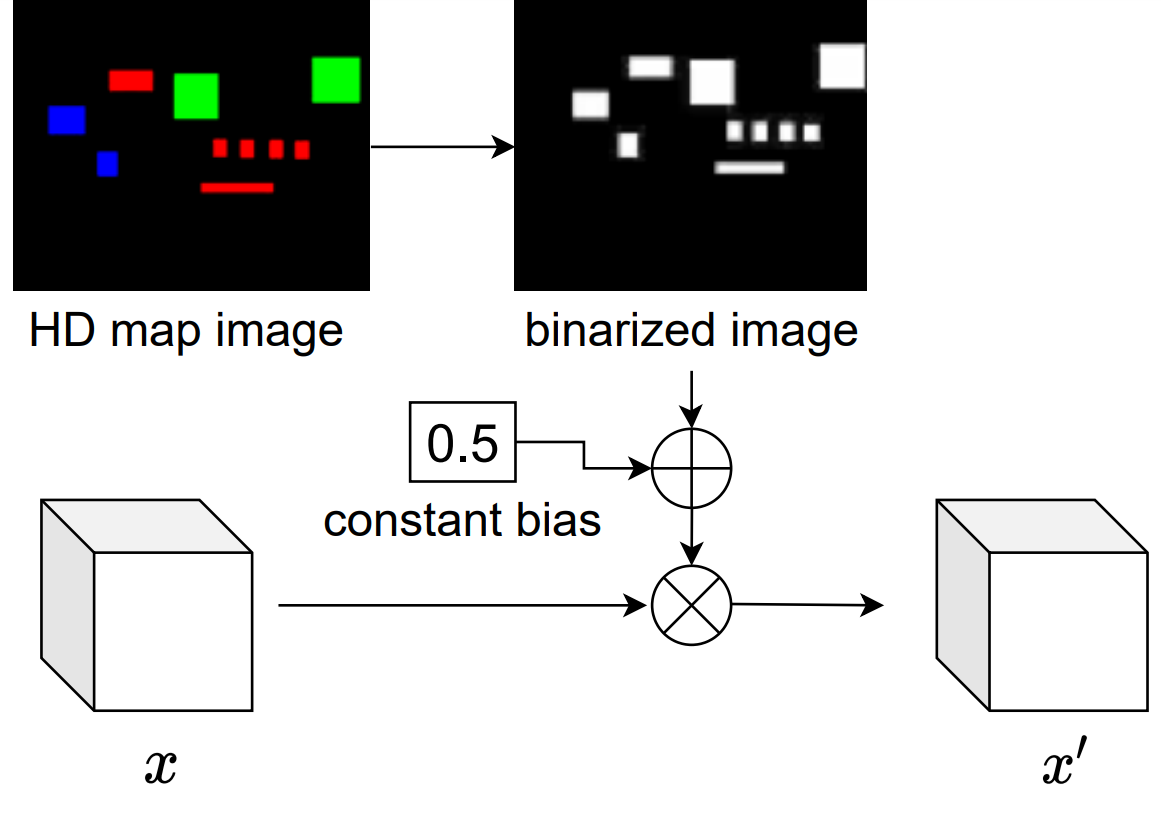
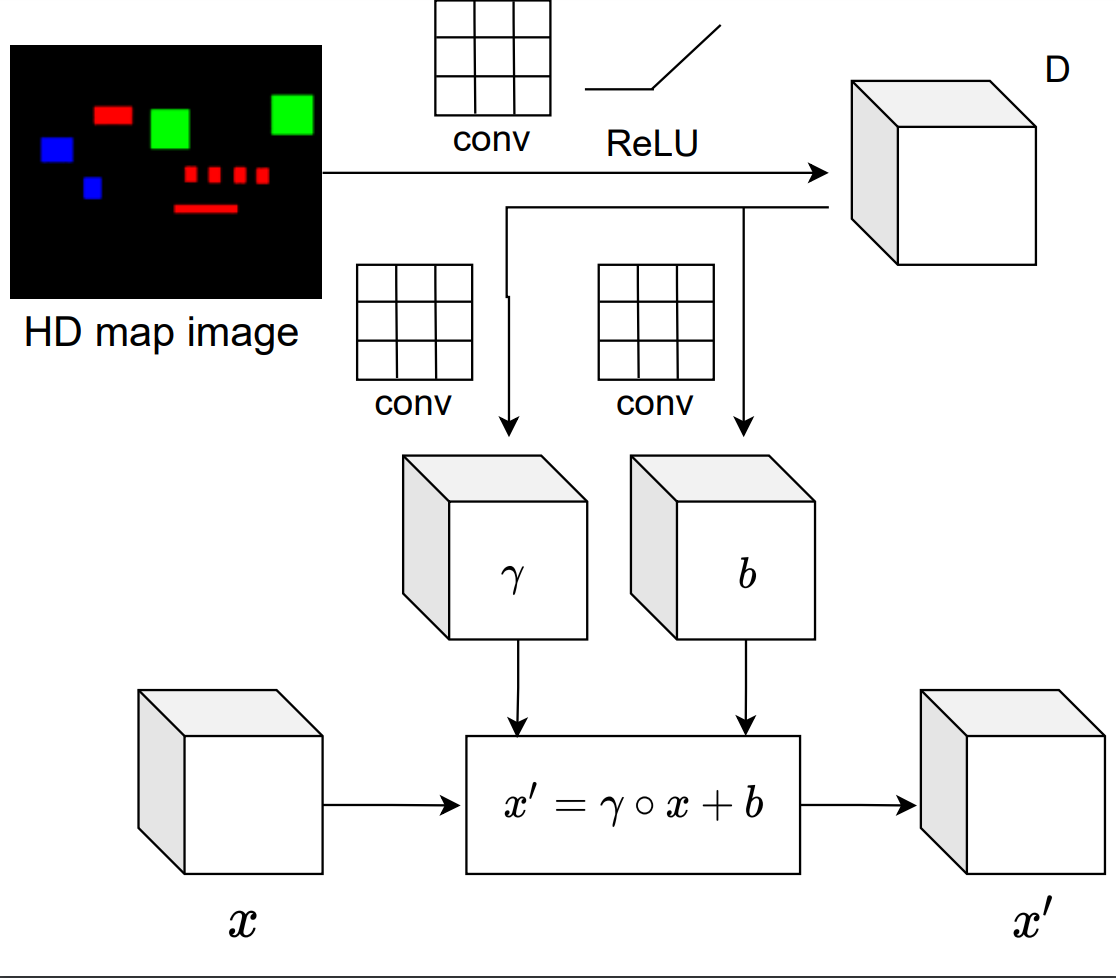
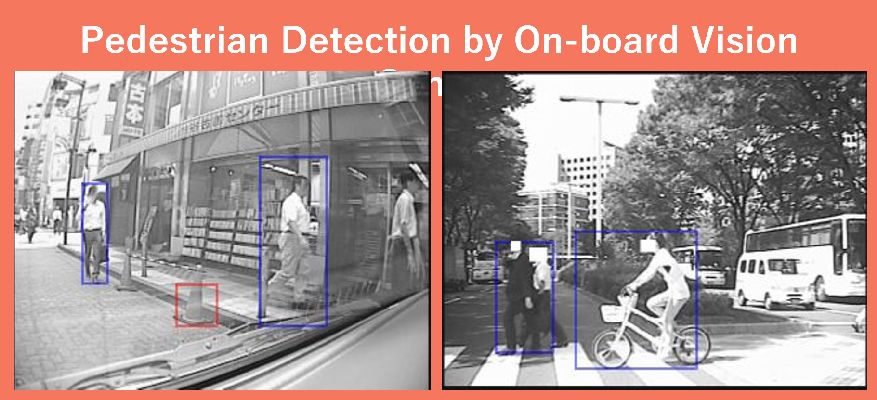
High definition (HD) 地図は環境に対する様々な情報を提供する、自動運転のためのデータソースです。 多くは、path planningなどに用いられてきましたが、object detectionなど周辺環境認識に有益な情報も多く含んでいると考えることができます。 本研究では、HD地図を用いた深層学習ベースのobject detectionモデルの提案を行っています。HD地図から得られる物体の位置情報には、自己位置推定に起因する誤差があるため、画像ベースのobject detectionモデルとの協調が大事になってきます。本研究では、そのようなモデルの探索を行い、特に悪環境におけるobject detectionにおいて高精度の結果を達成しています。
High definition (HD) maps are a data source for automated driving that provides a variety of information about the environment. Most of them have been used for path planning, but they can also be considered to contain a lot of useful information for object detection and other aspects of surrounding environment recognition. In this study, we propose a deep learning-based object detection model using HD maps, which is important to cooperate with image-based object detection models because the object location information obtained from HD maps has errors caused by self-position estimation. This study explores such a model and achieves highly accurate results, especially in object detection in adverse environments.