自動運転 - 自己位置推定
Autonomous Driving - Self-Localization
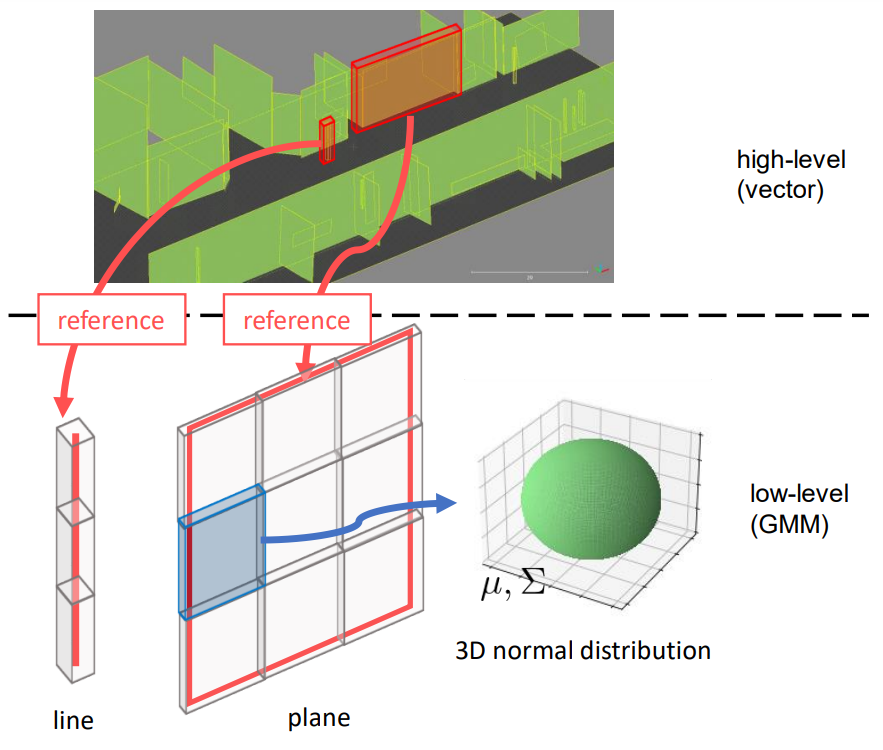
地図は自動運転、特に自己位置推定にとって重要なものです。 一方、Vector地図はGISの観点から全世界で整備されてきた地図で、環境に対するラフな形状の情報を持っています。しかし、このVector地図は自己位置推定にとっては不十分であり、より詳細な情報が必要です。 本研究では、既存のVector地図を構成する直線や平面のデータに対して、正規分布を埋め込んだ地図を提案します。提案地図は、Vector地図上に構築されるため、既存のVector地図データベースとの互換性を持ち、管理のしやすさがあります。一方で、埋め込まれた正規分布はより詳細な幾何的な情報を内包しているため、Normal distribution transformation (NDT)などを用いて、高精度の自己位置推定を実現することができます。 実際、我々の都市部における実験では自動運転に必要とされるレーンレベルの精度を達成しています。
High-definition maps (HD maps) are essential for map-based self-localization in autonomous driving. On the other hand, vector maps, including the rough geometric structure of the environment, are maintained in GIS around the world. In this study, we propose a map format that is compatible with vector maps but allows lane-level self-localization as an HD map. The proposed map consists of a set of NDT-like normal distributions, which can be easily accessed from the components of a vector map.