自動運転 - 交差点における状況認識と行動計画
Autonomous Driving
- Scene Understanding and Motion
Planning at Intersections
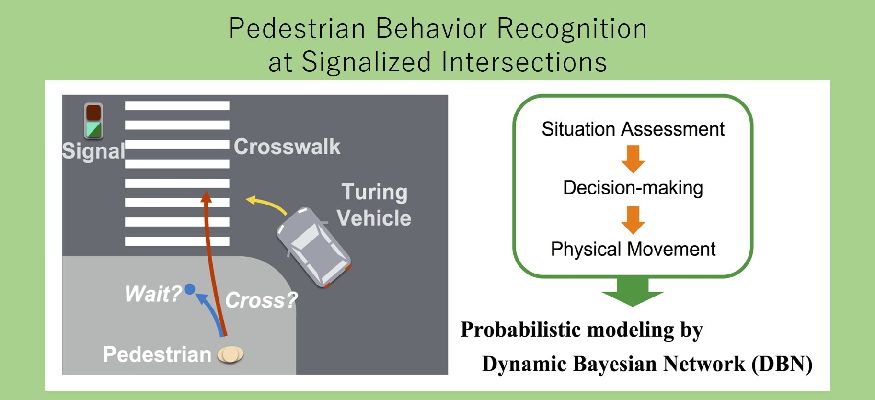
近年、自動車の自動運転やADAS(先進運転支援システム)が注目を集める中で、安全性という観点から歩行者保護は最重要課題の一つです。 現在、カメラやレーダーを用いた歩行者検出と自動ブレーキシステムは既に広がり始めているものの、非常に動的な歩行者の動きは予測しにくく、反応の遅れや、逆に過剰なアラートを生み出しています。 この2,3年で多くの研究がなされてきたものの、歩行者の動きのみに焦点を当てたこれらの研究は短時間的(~1秒)な予測しかできませんでした。 しかし、道路を歩く歩行者は単にランダムに移動しているのではなく、静的/動的環境に影響を受けながら行動しています。 本研究はそうした歩行者の行動を支配するやコンテキストや意思を考慮することで、より長時間的な予測を目的としてます。 具体的には、信号交差点の横断歩道付近という歩車間事故の多発する状況における、歩行者の行動の確率的なモデリングを行っています。 上記のように、歩行者は、状況のアセスメント→意思決定→物理的な移動、というプロセスを行っており、 この一連の原因→結果の確率的な関係をDynamic Bayesian Networkというパターン認識のフレームワーク内でモデル化しています。 この確率モデルに対して実際のデータによって学習を行うことで、信号の状態と歩行者の計測位置を入力として、 歩行者の横断歩道に対する横断意思(今横断するか次の青信号まで待つか)やモーション(歩く/走る/立ち止まる)を推定することができます。
Active safety systems which assess highly dynamic traffic situations including pedestrians are required with growing demands in autonomous driving and ADAS. We are focusing on one of the most hazardous traffic situations: the possible collision between a pedestrian and a turning vehicle at intersections. We propose a probabilistic model of pedestrian behavior to signalized crosswalks. For this purpose, we take not only pedestrian physical states but also contextual information into account. We propose a model based on the Dynamic Bayesian Network (DBN) which integrates relations among the intersection context information and the pedestrian behavior in the same way as human. Afterwards, the model jointly estimates their states by the particle filter. Experimental evaluation using real traffic data shows that this model is able to recognize the pedestrian crossing decision in advance from the traffic signal and pedestrian position information.





