自動運転 - 交差点における状況認識と行動計画
Autonomous Driving
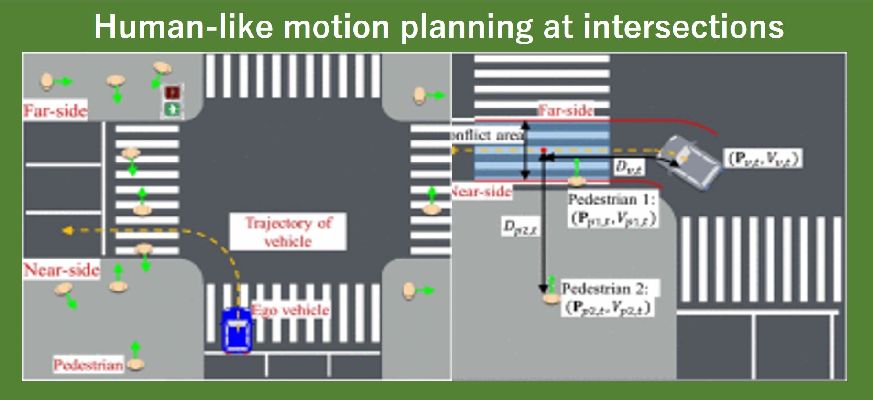
- Scene Understanding and Motion
Planning at Intersections
自動運転において、急激な減加速は乗客の快適さや周辺車両への影響など考えると適切ではありません。 また、自動運転車とそうでない自動車が混在するシチュエーションではこれは特に重要です。 この研究では、人間のドライバーのように周囲の環境を評価し車両を制御するモデルを提案します。 このモデルは、歩行者意図検出モデル、ギャップ検出モデル、車両制御モデルの3つから構成されています。 これらはそれぞれ、状況認識、意思決定、動作を行い、相互に依存関係があります。 さらにそれぞれのサブモデルは実際の交通状況の人間ドライバーのデータに基づいて構築、トレーニングされます。
Highly automated and fully autonomous vehicles are much more likely to be accepted if they react in the same way as human drivers do, especially in a hybrid traffic situation, which allows autonomous vehicles and human-driven vehicles to share the same road. This paper proposes a human-like motion planning model to represent how human drivers assess environments and operate vehicles in signalized intersections. The developed model consists of a pedestrian intention detection model, gap detection model, and vehicle control model. These three submodels are individually responsible for situation assessment, decision making, and action, and also depend on each other in the process of motion planning. In addition, these submodels are constructed and learned on the basis of human drivers' data collected from real traffic environments. To verify the effectiveness of the proposed motion planning model, we compared the proposed model with actual human driver and pedestrian data. The experimental results showed that our proposed model and actual human driver behaviors are highly similar with respect to gap acceptance in intersections.








