自動運転 - 危険推定
Autonomous Driving - Risk Assessment
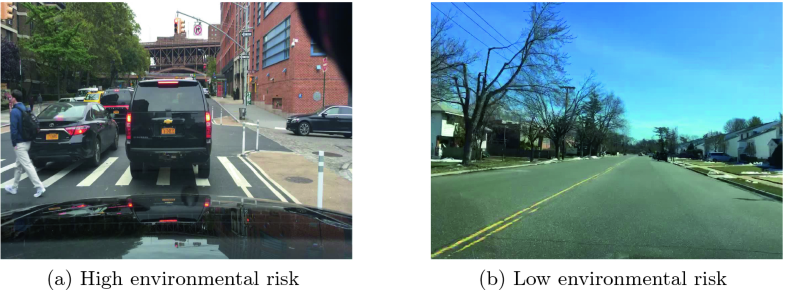
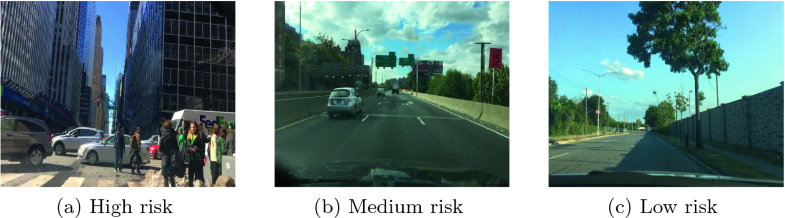
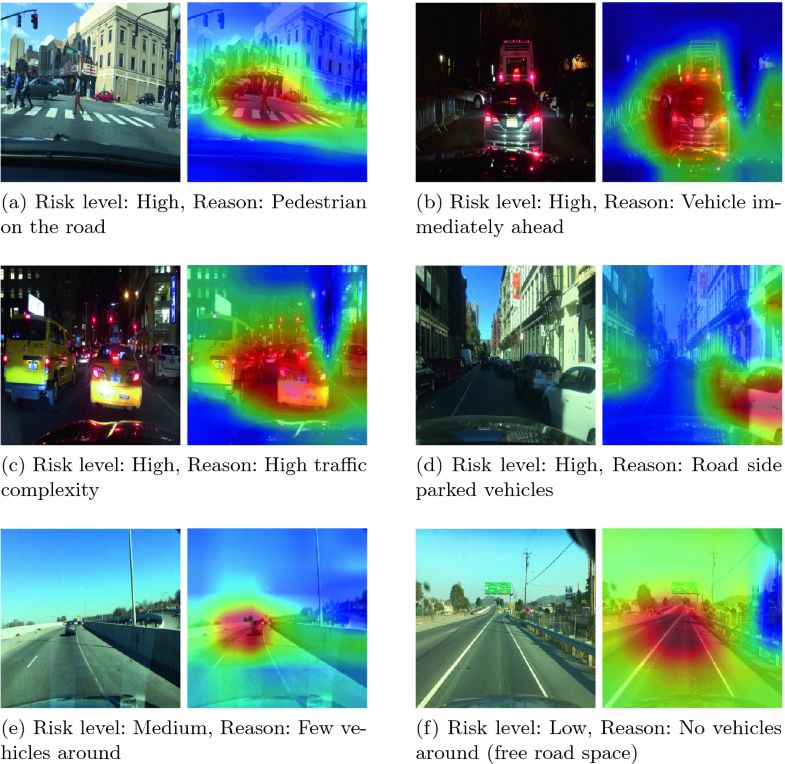
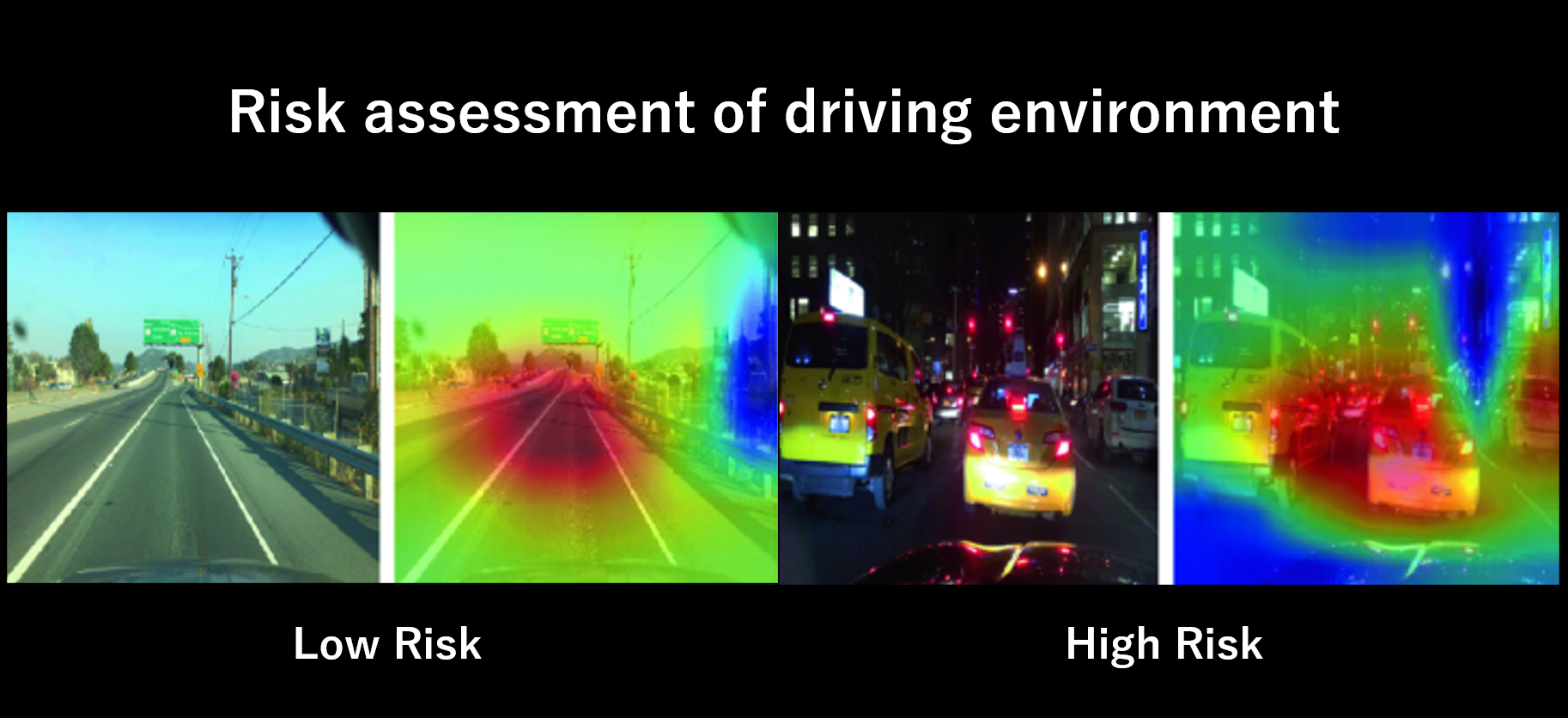
自動運転車の主な目標は、より安全で効率的な輸送手段を提供することです。 そのためには、危険なシーンが起こってから回避行動をとるのではなく、常に潜在的な危険を推定する必要があります。 本研究では、車載カメラ画像を使用して潜在的な危険推定を行います。 弱教師あり分類機を用いたEnd-to-Endなモデルを開発し、交通シーンの危険推定に関する新しい視点を提案します。 実験結果は提案されたモデルが各シーンを3つの異なるレベルに分類できることを示します。 また特性マップ(saliency map)により提案したモデルの出力の要因を視覚的に推論しています。
A key goal of intelligent vehicles is to provide a safer and more efficient method of transportation. One important aspect of intelligent vehicles is to understand the road scene using vehicle-mounted camera images. Perceiving the level of driving risk of a given road scene enables intelligent vehicles to drive more efficiently without compromising on safety. Existing road scene understanding methods, however, do not explicitly nor holistically model this notion of driving risk. This paper proposes a new perspective on scene risk perception by modeling end-to-end road scene affordance using a weakly supervised classifier. A subset of images from BDD100k dataset was relabeled to evaluate the proposed model. Experimental results show that the proposed model is able to correctly classify three different levels of risk. Further, saliency maps were used to demonstrate that the proposed model is capable of visually reasoning about the underlying causes of its decision. By understanding risk holistically, the proposed method is intended to be complementary to existing advanced driver assistance systems and autonomous vehicles.